Self-consistency has proven to be an effective technique for improving LLM performance on natural language reasoning tasks in a lightweight, unsupervised manner. In this work, we study how to adapt self-consistency to visual domains. Specifically, we consider the generation and verification of LLM-produced motion graphics trajectories. Given a prompt (e.g., "Move the circle in a spiral path"), we first sample diverse motion trajectories from an LLM, and then identify groups of consistent trajectories via clustering. Our key insight is to model the family of shapes associated with a prompt as a prototype trajectory paired with a group of geometric transformations (e.g., rigid, similarity, and affine). Two trajectories can then be considered consistent if one can be transformed into the other under the warps allowable by the transformation group. We propose an algorithm that automatically recovers a shape family, using hierarchical relationships between a set of candidate transformation groups. Our approach improves the accuracy of LLM-based trajectory generation by 4-6%. We further extend our method to support verification, observing 11% precision gains over VLM baselines.
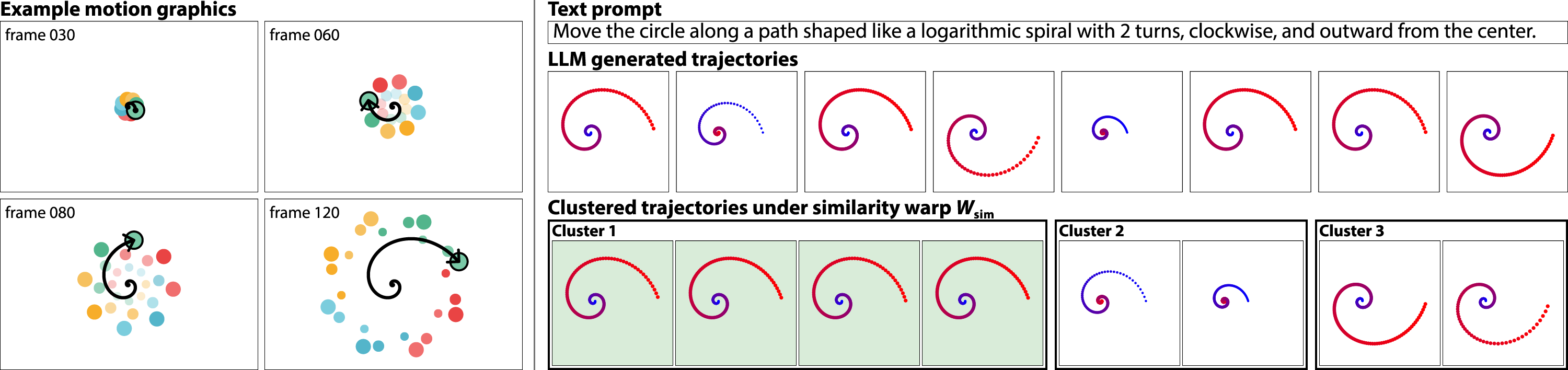
Complex motion graphics animations are often composed of trajectories in the form of geometric shapes (left). While LLMs can generate motion graphics animations from a prompt describing the shape of an object's trajectory, the resulting animation does not always follow the prompt specification (right, motions move from blue to red). We present a self-consistency method that enables more accurate LLM-based trajectory generation without supervision and show that it can be used for trajectory verification. We ask the LLM to generate multiple trajectory samples, cluster the samples using a hierarchy of geometric transformation groups, and choose the largest cluster as the most self-consistent set. We choose the centroid of the largest cluster as the most self-consistent generation, and verify a new trajectory by checking whether it can be added to the largest cluster (i.e. its distance to this centroid falls within a threshold τ).
@inproceedings{Ma2026selfconsistency, author = {Ma, Jiaju and Jones, R. Kenny and Wu, Jiajun and Agrawala, Maneesh}, title = {Self-Consistency for LLM-Based Motion Trajectory Generation and Verification}, booktitle = {Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR)}, month = {June}, year = {2026}, pages = {17357-17366} }